Разработчик робота Федора рассказал о пяти своих сложнейших задачах
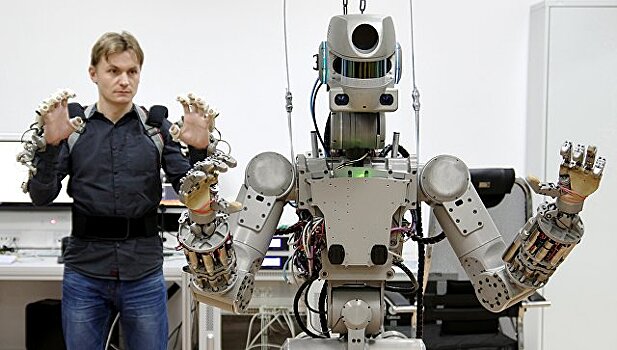
МОСКВА, 13 окт — РИА Новости. Разработчик самого известного российского робота Федора, руководитель проекта Национального центра развития технологий и базовых элементов робототехники Фонда перспективных исследований (ФПИ) Сергей Хурс рассказал РИА Новости о наиболее сложных задачах, которые сегодня стоят перед создателями человекоподобных роботов — андроидов. Федор (FEDOR — Final Experimental Demonstration Object Research) — первый отечественный человекообразный робот, созданный в рамках проекта ФПИ. Он должен заменить человека в местах повышенного риска — например, в спасательных операциях и в космосе. Планируется, что Федор в 2021 году отправится на орбиту на новом российском космическом корабле "Федерация". "Несмотря на то, что технологии для производства андроидов активно развиваются и внедряются, можно выделить несколько областей, в которых дальнейший значимый прогресс невозможен без серьезных научно-технических прорывов. Это энергообеспечение автономных робототехнических платформ, компонентная база, программное обеспечение, техническое зрение и миниатюризация", – рассказал Хурс. Как пояснили в фонде, андроиды создаются для замены людей тех местах, где среда обустроена под человека, но условия работы представляют для него опасность – например, в зонах, где произошло химическое или радиационное заражение, в местах стихийных бедствий, природных или техногенных катастроф. Кроме того, андроиды как особый вид роботов востребованы там, где требуется высокая многозадачность, тогда как отдельные задачи могут более эффективно решаться более простыми специализированными роботами, такими как беспилотники (съемка, сбор информации), колесные и гусеничные платформы (перемещение по плоскости). "В будущем предполагается большой охват различных сфер деятельности человека, в которых роботы-андроиды либо заменят человека, либо станут его надёжными помощниками. Например, робот Федор станет первым испытателем нового российского космического корабля "Федерация", – добавили в ФПИ. Энергообеспечение Как рассказал эксперт, существующие на сегодня роботы-андроиды способны автономно функционировать в течение сравнительно непродолжительного времени – от получаса до двух часов. Эти ограничения связаны с количеством батарей (аккумуляторы, топливные элементы), которые можно встроить внутрь конструкции или надеть в качестве ранца. "Использование кабеля создает множество неудобств и ограничивает радиус действия робота. Задача повышения автономности связана с повышением удельной ёмкости батарей как минимум в несколько раз: тогда вместо коротких задач станет возможным планирование более длительных миссий без необходимости возвращаться на базу для постоянной зарядки или замены аккумуляторов", – пояснил Хурс. Элементная база Кроме того, для того, чтобы робот свободно передвигался и выполнял поставленные перед ним задачи, ему нужны качественные приводы: электродвигатели, редукторы, гидравлические и другие компоненты. В России уже есть отдельные решения, но нет подходящего выбора и складского запаса готовых изделий, нет возможности их оперативного заказа со сроком исполнения в несколько дней или недель, а не месяцев. "Вопрос создания компонентной базы стоит достаточно остро ввиду того, что для массового производства роботов-андроидов необходимы недорогие и качественные моторы и редукторы, сенсоры, энкодеры и многие другие приборы. В настоящее время серийное производство таких элементов в России ещё только предстоит наладить в массовом масштабе", – добавил Хурс. Программное обеспечение Также все умения, навыки и способности робота зависят от программного обеспечения. Для того, чтобы андроид смог воспроизвести движения, которые человек выполняет не задумываясь (например, подняться по лестнице), его вычислительные мощности должны решить множество задач – от точного определения рельефа, распознавания препятствий, планирования перемещений, до точной выдачи мгновенных значений токов на каждый из множества одновременно действующих электроприводов. "Учитывая то, что заранее рассчитать траекторию движения робота со всеми ее вариациями невозможно, разработчики создают математические модели, позволяющие роботу методом "проб и ошибок" накапливать подобие человеческого "опыта", – объяснил представитель ФПИ. При этом алгоритмы автономного управления андроида можно разделить на жесткие и гибкие. Жесткие алгоритмы сравнительно просты и позволяют роботу совершать несложные повторяющиеся операции (например, обработать заготовку на станке). Если условия выполнения действий меняются – например, нужно дотянуться до упавшего предмета — роботу нужны гибкие алгоритмы и возможность работать с данными, получаемыми от обратных связей. "Корректировать действия в изменившихся условиях роботу помогает информация, которую он получает через датчики контакта, различные сенсоры и техническое зрение. Чем больше у робота гибких алгоритмов – тем большими возможностями он обладает", – рассказали в фонде. Как отметил собеседник агентства, на сегодняшний день проблема создания программного обеспечения для андроидов стоит достаточно остро, потому что требуется формализация множества действий человека, которые он совершает не задумываясь, машинально на основе личного опыта и приобретённых навыков. По его словам, формализовать – это значит осознать структуру, логику и дать количественное описание действиям человека, которые мы хотим передать роботу. Для этого создаются новые математические модели и алгоритмы управления. Ведь сам процесс моделирования движений сложной многозвенной машины — робота-андроида – во многом процесс творческий и неоднозначный. "Создание "матрицы движения", за которую у человека отвечает спинной мозг и мозжечок – это искусство. Сколько существует программистов высокого уровня, столько и подходов к заданию кинематики (скоростей и траекторий), динамики (прилагаемых сил и реализуемых ускорений). При этом гибкость алгоритмов подразумевает их подстройку под условия, отличающиеся от некоего набора стандартных действий", – объяснил Хурс. В частности, большие возможности открывают алгоритмы с элементами самообучения или обучения подражанием, когда робот преобразует наблюдаемое действие человека в библиотечные "алгоритмы-слепки" с возможностью их рационального использования. С некоторой натяжкой это можно назвать "навыком". В качестве примера он привел навык езды на велосипеде: научившись единожды, человек сохраняет соответствующий навык даже при многолетнем перерыве. Несмотря на возможную потерю навыка в точности движений, мышцы человека "помнят" движение и срабатывают с нужной координацией и силой. "Для того, чтобы создать подобие такого "опыта" у робота, нужны более сильные средства, чем метод "проб и ошибок". Математические модели и методы построения или перестроения алгоритмов должны вбирать в себя принципы, обеспечивающие повышение гибкости алгоритмов за счёт сенсорных обратных связей, иначе разработчиков и будущих потребителей ожидает долгий путь отработки жёстких алгоритмов, постепенного "нащупывания" путей повышения их гибкости", – добавил Хурс. Однако, чтобы робот выполнял не только сложные задачи, но и целые "миссии" — то есть научился импровизировать на основе накопленного опыта – ему требуется большое количество качественных вычислительных мощностей, качественно новых математических моделей и алгоритмов. Так, с целью создания нового программного обеспечения для антропоморфных роботов и для выявления сильных команд, способных эффективно решать данные задачи, в 2017 году ФПИ совместно с Минобрнауки России запустил открытый научно-технический конкурс. В настоящее время студенты и молодые ученые из российских вузов ищут подходы и разрабатывают программы, которые позволяют роботу "научиться" новым движениям и коротким миссиям, состоящим из нескольких заданий. Техническое зрение Разработка нового программного обеспечения для реализации функций и задач технического зрения — это отдельный пласт, который требует больших вычислительных мощностей и собственных специфических алгоритмов, отметили в фонде. Техническое зрение позволяет роботу получать информацию об окружающем пространстве: распознавать объекты действия, препятствия и ограничения, а также условия выполнения действий, которые вынуждают скорректировать свои движения (например, скользкий пол или наклонная поверхность стола, куда нужно положить предмет). "Технологии, которые позволяют роботу получать и интерпретировать информацию об окружающем пространстве, сегодня активно развиваются, но пока являются дорогостоящими: например, это лидары — лазерные сканеры, которые позволяют роботу обрабатывать информацию об окружающих объектах и создавать единую трехмерную модель прилегающего к роботу пространства с учетом всех предметов внутри него", – рассказали в ФПИ. Если у робота есть такая модель, он может действовать в том числе в полной темноте, так как созданная им 3D-сцена или карта с точными формами и размерами всех видимых предметов достаточна для планирования действий. "Технологии оцифровки окружающего пространства с помощью лазерных сканеров можно заменить на технологии, в основе которых лежит обработка информации со стерео-видеокамер. Мы снова обращаемся к разработке "умного" программного обеспечения. Его эффективность напрямую зависит от того, насколько мы сможем понять, как это происходит у людей", – пояснил Хурс. Миниатюризация "На борту" андроидной платформы расположено множество процессоров, которые обрабатывают сенсорную информацию и увязывают параллельные задачи с различными приоритетами — например, передвижение по маршруту с поддержанием статического и динамического равновесия. Как рассказали в ФПИ, фактически для каждой емкой математической задачи нужен собственный процессор – при том, что соответствующие задачи во многих случаях должны решаться параллельно и взаимно увязываться. Каждый из таких процессоров обладает определенными габаритами и имеет собственное значение потребляемой мощности. "Поиск новых возможностей для уменьшения габаритов процессоров сегодня является одной из самых актуальных научно-технических задач в мировом масштабе: человечество подошло к тем пределам, когда при имеющихся технологиях практически невозможно существенно уменьшить размер процессоров и повысить их производительность", – объяснил Хурс. К этой же области можно отнести вопрос создания новых приводов на основе искусственных мышц. Если у человека более двухсот степеней подвижности (под степенями подвижности подразумевается количество возможных независимых угловых и линейных перемещений), то у лучших роботов-андроидов их не более 60. "Одна из самых гибких подвижных систем в теле человека – это кисть. Электромеханические и гидравлические приводы не позволяют создать полноценную механическую кисть в габаритах человеческой. Требуемое количество моторов, редукторов и других элементов невозможно разместить ни самой кисти, ни в предплечье", – уточнил собеседник РИА Новости. Поэтому характеристики манипуляторов и захватов только по некоторым позициям соответствуют или превосходят человеческие руки и кисти, а в подавляющем большинстве случаев далеко отстают. "Перспектива создания искусственных мышц с характеристиками, аналогичными человеческим мышцам, открывает новые возможности, однако на сегодняшний день технологии искусственных мышц не торопятся выйти за стены исследовательских лабораторий и стать достоянием разработчиков роботов", – заключил Хурс.